I've been doing a lot of tweaking and fine-tuning since the previous update.
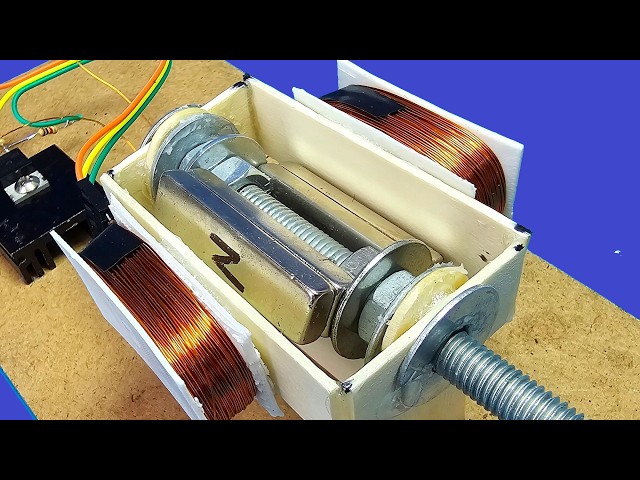
I've added a counter-weight to balance the spinning parts, and hot-glued the whole thing onto the baseboard.
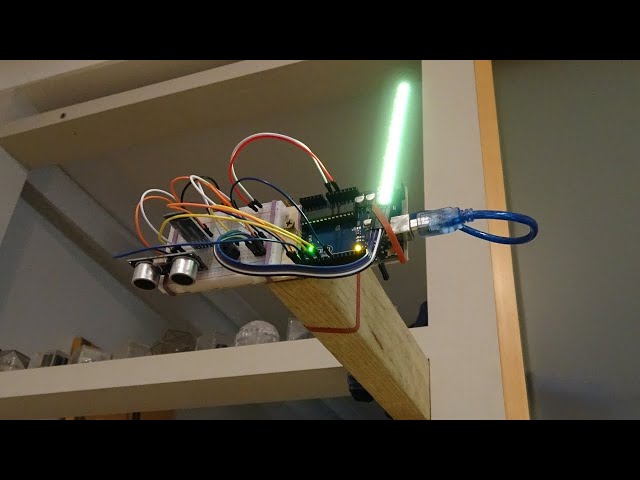
The motor driver and LED strips are now controlled by separate Arduinos, and the LEDs are now powered by a 9v battery. Trying to run both from the same Arduino caused timing conflicts as seen in a previous video.
I did try powering the LED controller using the wires connected to the bearings, but it was randomly restarting due to inconsistent power supply.
The current setup is sufficient for testing the LED control code, but I would like to find a way to get better electrical conductivity through the bearings.




14 Comments