The video provides an in-depth exploration of the principles of reinforcement learning, emphasizing the function of the reward system in quantifying the desirability of different action-state pairs. This reward system serves as the guidance mechanism for the agent's learning progression. In the context of reinforcement learning, the policy is a mapping from observed states to possible actions. The central aim is to establish an optimal policy that maximizes the cumulative expected reward. This process often involves constructing a function that accurately predicts the anticipated reward for each state-action pair.
The discussion transitions into the application of transformer architectures within the reinforcement learning framework, with a focus on non-Markovian rewards. Transformers are known for their capacity to process sequential data and model long-term dependencies, making them highly suitable for dealing with rewards that are contingent on a sequence of state transitions. The capability of transformers extends to complex systems like robotics and multi-agent systems, where they can handle high-dimensional sequential observations and generate corresponding actions. In the context of multi-agent systems, transformers can process the current states of all agents, outputting a distribution of potential actions for each agent. Through training, this action distribution is adjusted to favor actions that lead to successful task completion.
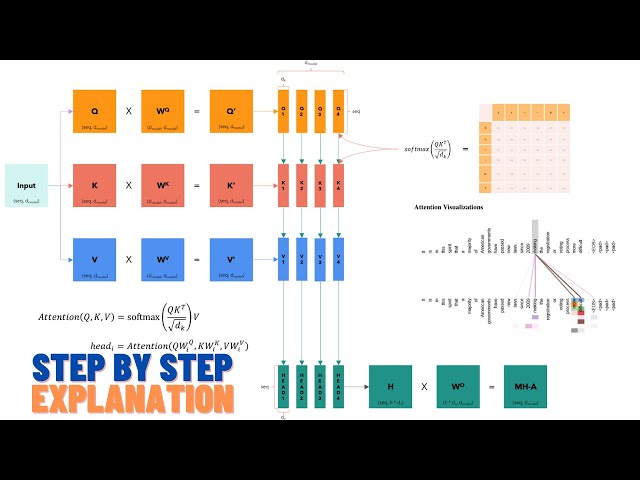
The process of training a transformer model in a multi-agent system is multifaceted. It requires an input representation of the current state of all agents in a transformer-compatible format, often encoded into vectors. The model processes these state representations via the self-attention mechanism and feed-forward networks, establishing relational mappings between different agents' states. A reward function is employed to gauge the effectiveness of the actions executed by the agents, with the transformer parameters adjusted via reinforcement learning algorithms such as Proximal Policy Optimization (PPO) to maximize the expected cumulative reward. The training algorithm maintains a delicate equilibrium between exploration (investigating new actions) and exploitation (adhering to known actions), a dynamic that necessitates careful calibration and optimization.
Transformers in Reinforcement Learning: A Survey
https://arxiv.org/pdf/2307.05979.pdf
(all rights with authors)
#reinforcementlearning
#ai
#explanation




9 Comments